Generation of Three-Dimensional Image of Objects Submerged in Murky Water
DOI:
https://doi.org/10.25043/19098642.84Keywords:
three-dimensional digitizing, triangulation, thresholding, skelotonization, renderingAbstract
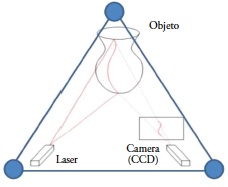
This article presents the design and implementation of a novel method to generate 3D coordinates from the projection of a laser line over a solid object and the processing of the images obtained during scanning. The result obtained is a 3D model of an isometric view that provides the possibility of being seen from different perspectives under a virtual environment. The methodology is applied in the capture and reconstruction of 3D images of objects submerged in murky waters.
Downloads
References
CACCIA, M. (2007). Vision-based ROV horizontal motion control: Near-seafloor experimental results. Control Engineering Practice, Vol. 15, pp. 703-714.
DEMA, M.A. (2006). 3D Reconstruction for Ship Hull Inspection. Master Thesis. Heriot Watt University. Scotland, UK.
DESERTSTAR, "Ship hull inspections with AquaMap", 2006, www.desertstar.com.
MONTALVO, M. “Técnicas de visión estereoscópica para determinar la estructura tridimensional de la escena”. Tesis de Maestría. Universidad Complutense de Madrid. 2010.
RAMÍREZ, J., VÁSQUEZ, R., GUTIÉRREZ, L., FLÓREZ, D. (2007). Mechanical/Naval Design of an Underwater Remotely Operated Vehicle (ROV) for Surveillance and Inspection of Port Facilities. Proceedings of IMECE2007 ASME 2007 International Mechanical Engineering Congress and Exposition, Seattle, Washington, USA.
REED, S., CORMACK, A., HAMILTON, K., TENA I., LANE, D. (2006). Automatic Ship Hull Inspection using Unmanned Underwater Vehicles. Proceedings of the 7th International Symposium on Technology and the Mine Problem. Monterey, USA. May, 2006.
VAGANAY, J., ELKINS, M., ESPOSITO, D., O’HALLORAN, W., HOVER, F., KOKKO, M. (2006A). Ship Hull Inspection with the HAUV: US Navy and NATO Demonstrations Results. IEEE/MTS Oceans’06, Boston MA, USA, Sept. 18-21, 2006.
VAGANAY, J., ELKINS, M., ESPOSITO, D., O’HALLORAN, W., HOVER, F., KOKKO, M. (2006B). Hovering Autonomous Underwater Vehicle for Ship Hull Inspection: Demonstration Results. Undersea Defense Technology Pacific (UDT Pacific ’06), San Diego CA, USA, Dec. 6-8, 2006.
ZAINAL, Z.B. (2007). Development of a Vision System for Ship Hull Inspection. Master Thesis. Universiti Sains Malaysia.
Published
How to Cite
Issue
Section
License
The authors who publish in this Journal certify that:
- The work submitted for publication in The Ship Science and Technology journal, was written by the author, given that its content is the product of his/her direct intellectual contribution.
- All data and references to material already published are duly identified with their respective credits and are included in the bibliographic notes and quotations highlighted as such.
- All materials submitted for publication are completely free of copyrights; consequently, the author accepts responsibility for any lawsuit or claim related with Intellectual Property Rights thereof, Exonerating of responsibility to The Science and Technology for the Development of Naval, Maritime, and Riverine Industry Corporation, COTECMAR.
- In the event that the article is chosen for publication by The Ship Science and Technology journal, the author state that he/she totally transfers reproduction rights of such to The Science and Technology for the Development of Naval, Maritime, and Riverine Industry Corporation, COTECMAR.
- The authors retain the copyright and transfer to COTECMAR the right of publication and reproduction of the work which will be simultaneously subject to the Creative Commons Attribution License (CC -BY) , which allows the license to copy, distribute, display and represent the work and to make derivative works as long as it recognizes and cites the work in the manner specified by the author or licensor.
- For more information about the Creative Commons Attribution License (CC -BY) and his use and scope, please visit the following web page https://creativecommons.org/licenses/by-sa/4.0/legalcode